✖
机器人产品线
工业机器人
●ABB工业机器人
●埃斯顿机器人
●海康工业机器人
协作机器人
●UR 优傲机器人
机器人夹爪
机器人底座
视觉产品线
3D相机
●振镜立体相机
●散斑结构光立体相机
●RGB-D智能立体相机
●三维轮廓测量仪
●TOF相机
面阵相机
●面阵相机产品
线阵相机
●线阵相机产品
镜头与配件
●镜头
●线缆
●光源
●日本kowa
AI & 云 产品线
BOX
Deepseek一体机
工控机
服务器
传感器产品线
西克
●槽型传感器
●读码器
●编码器
●距离传感器
●RFID
●速度传感器
●接近传感器
●光电传感器
倍福
解决方案
技术解决方案
●机器人视觉
●视觉测量
●AI缺陷检测
●AI识别
●视觉定位
●3D视觉
●装车自动化
●其他技术解决方案
行业解决方案
●3C电子
●物流
●锂电
●金属加工
●汽车
●其他行业解决方案
高校科研解决方案
●移动式短波红外荧光检测系统
●高速相机在体育运动行业运用
技术服务
软件测评
软件下载
文档下载
关于我们
企业文化
公司简介
发展历程
联系我们
人才招聘
机器人产品线
工业机器人
协作机器人
机器人夹爪
机器人底座
视觉产品线
3D相机
面阵相机
线阵相机
镜头与配件
AI & 云 产品线
BOX
Deepseek一体机
工控机
服务器
传感器产品线
西克
倍福
解决方案
技术解决方案
行业解决方案
高校科研解决方案
技术服务
软件测评
软件下载
文档下载
关于我们
企业文化
公司简介
发展历程
联系我们
人才招聘
一级标题
工业机器人
协作机器人
机器人夹爪
机器人底座
工业机器人
●ABB工业机器人
●埃斯顿机器人
●海康工业机器人
协作机器人
●UR 优傲机器人
机器人夹爪
机器人底座
一级标题
3D相机
面阵相机
线阵相机
镜头与配件
3D相机
●振镜立体相机
●散斑结构光立体相机
●RGB-D智能立体相机
●三维轮廓测量仪
●TOF相机
面阵相机
●面阵相机产品
线阵相机
●线阵相机产品
镜头与配件
●镜头
●线缆
●光源
●日本kowa
一级标题
BOX
Deepseek一体机
工控机
服务器
BOX
Deepseek一体机
工控机
服务器
一级标题
西克
倍福
西克
●槽型传感器
●读码器
●编码器
●距离传感器
●RFID
●速度传感器
●接近传感器
●光电传感器
倍福
一级标题
技术解决方案
行业解决方案
高校科研解决方案
技术解决方案
●机器人视觉
●视觉测量
●AI缺陷检测
●AI识别
●视觉定位
●3D视觉
●装车自动化
●其他技术解决方案
行业解决方案
●3C电子
●物流
●锂电
●金属加工
●汽车
●其他行业解决方案
高校科研解决方案
●移动式短波红外荧光检测系统
●高速相机在体育运动行业运用
一级标题
软件测评
软件下载
文档下载
软件测评
软件下载
文档下载
一级标题
企业文化
公司简介
发展历程
联系我们
人才招聘
企业文化
公司简介
发展历程
联系我们
人才招聘
×
首页
>
解决方案
>
行业解决方案
>
●锂电
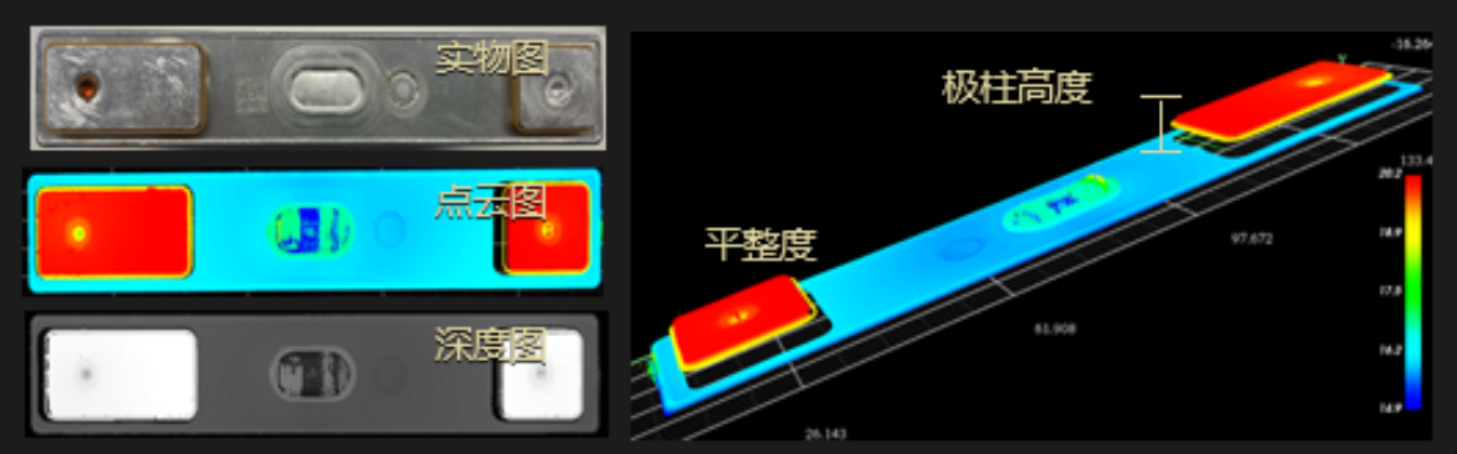
顶盖尺寸测量
■ 项目难点
● 检测节拍、精度要求高
● 锂电池表面反光,影响成像稳定性
■ 项目需求
● 检测锂电池顶盖平整度、长宽尺寸
● 检测正负极柱高度、平整度、共面度
■ 方案
● MV-DP2060-01H + VM 3D算法平台
■ 效果
● 通过相机扫描成像和VM算法处理,精准测量出 锂电池顶盖尺寸,重复性检测精度为1μm
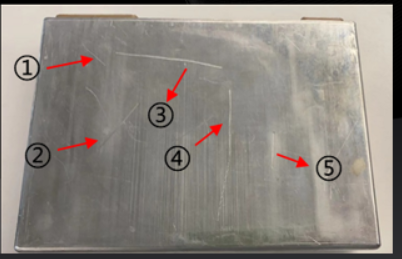
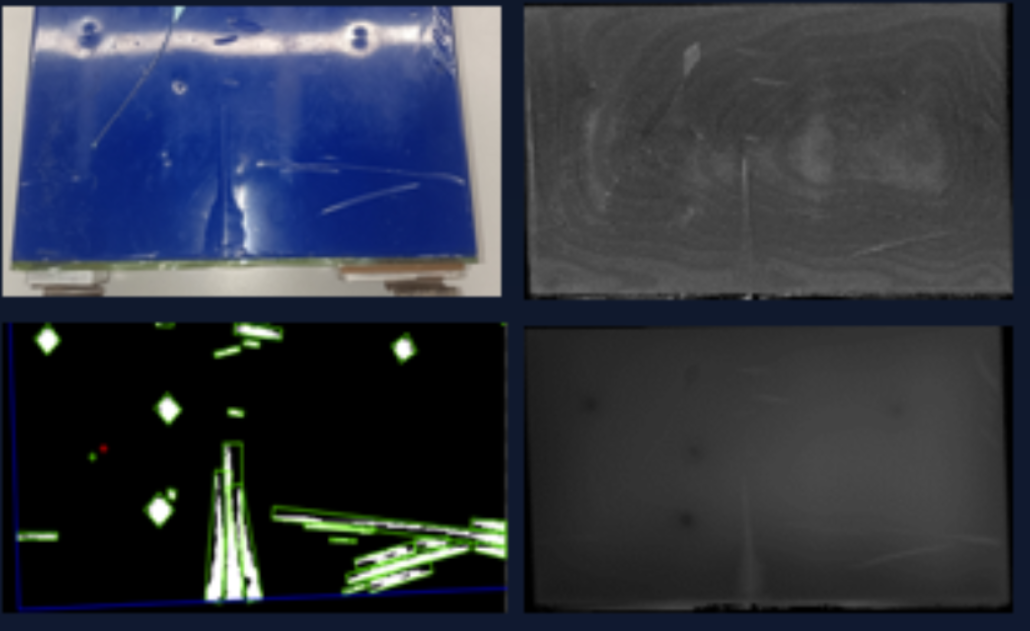
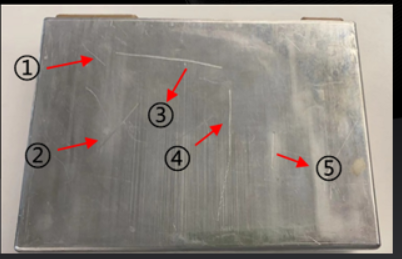
包膜前凹坑检测
■ 项目难点
● 划痕种类繁多,细而深的划痕和针孔缺陷容易漏检
● 对于外壳表面的擦伤进行误判
■ 项目需求
● 检测电池外壳直径0.3mm,高度0.1mm以上的凹坑和凸起
● 检测长10mm,宽1mm,深0.05mm以上的划痕
■ 方案
● MV-DP2120-01H
● VM 3D软件:AI+3D检测
■ 效果
● 通过相机扫描成像和VM算法处理,精准测量出 锂电池顶盖尺寸,重复性检测精度为1μm
包膜后鼓包检测
■ 项目难点
● 蓝膜本身光学特性缺陷特征不明显
● 缺陷种类多且部分缺陷种类样本难收集
■ 项目需求
● 电池在包蓝膜后,检测蓝膜表面形成的直径大于2mm的气泡
● 包膜边缘不平整/裂纹/脏污/磨破
■ 方案
● MV-DP2120-01H + VM 3D算法平台
■ 效果
● 通过深度图中的高度信息差有效识别出包膜后的 鼓包、破损、褶皱等缺陷,漏检率为0
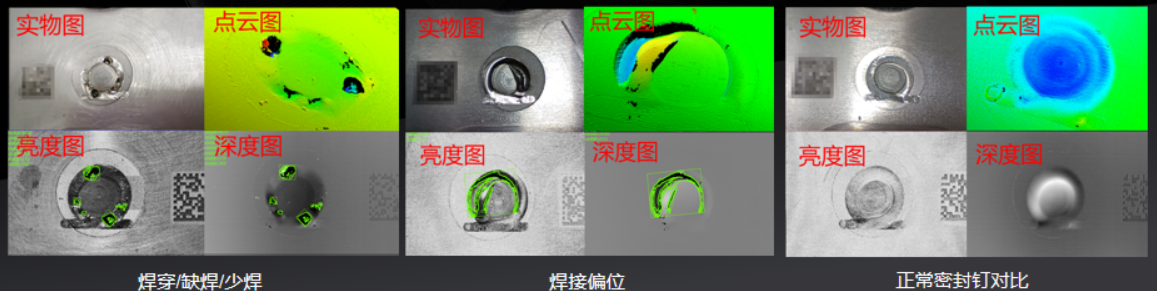
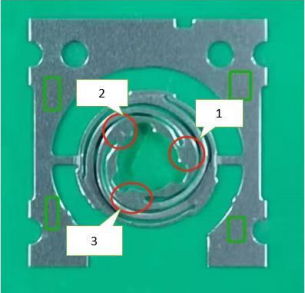
焊接缺陷检测
■ 项目难点
● 密封钉焊接缺陷形态丰富,难以界定其形态边缘
● 密封圈中存在灰尘、脏污,干扰成像效果
■ 项目需求
● 密封钉焊接后扫描焊痕,检测是否存在爆孔、断焊、针孔、虚焊等
● 检测密封圈是否存在偏位
■ 方案
● MV-DP2060-01H + VM 3D算法平台
■ 效果
● 用图像增强模块对密封钉深度图进行预处理,再通 过滤波差分有效识别密封钉焊接缺陷,漏检率为0
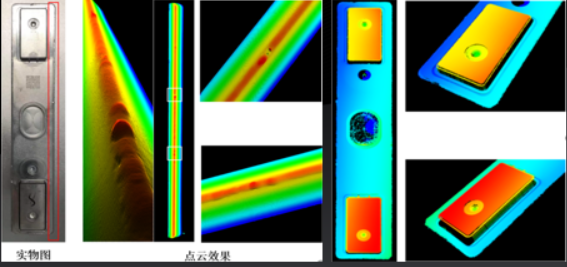
顶盖周边焊接检测
■ 项目难点
● 检测节拍要求高,四边检测2.5s以内
● 焊缝缺陷类型多,部分深度缺陷不易检出
■ 项目需求
● 顶盖周边焊接完成后,需要检测焊痕外观缺陷检测 (爆点、凹坑、断焊、虚焊、偏位、翻边)
■ 方案
● MV-DP2060-01H + 定制软件
■ 效果
● 通过点云数据中的高度缺陷,可有效拦截出爆点、凹坑、断焊、虚焊不良以及翻边高度的检测
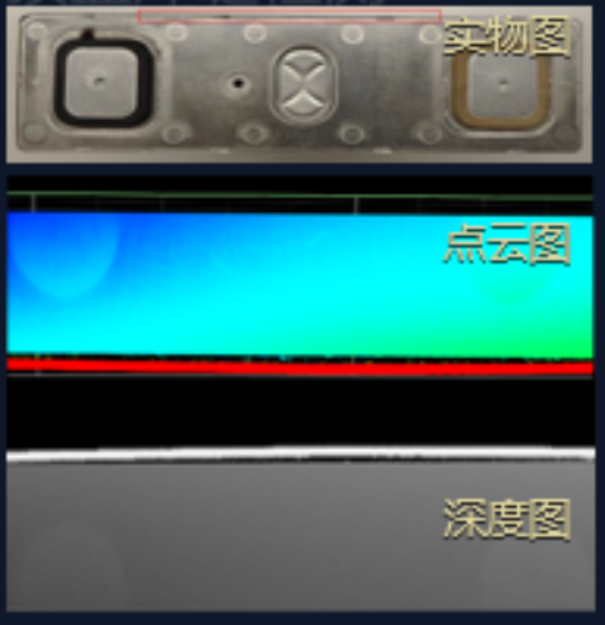
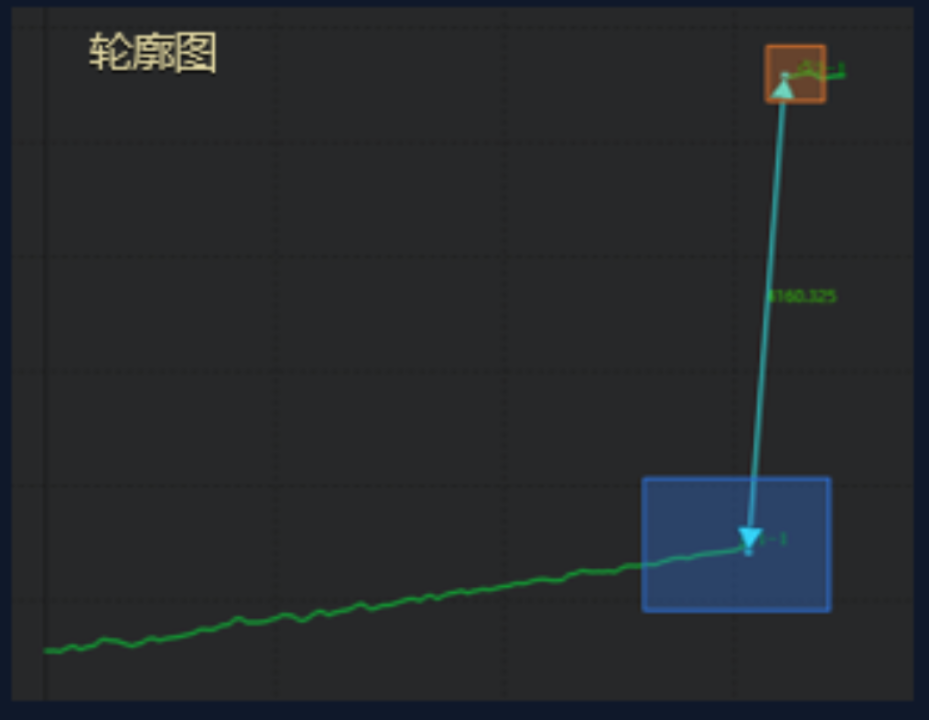
顶盖焊缝检测
■ 项目难点
● 焊接缝隙狭窄,检测精度要求高
● 焊缝边缘有噪点干扰,为算法处理带来干扰
■ 项目需求
● 电芯入壳后顶盖焊接前,需要检测顶盖与壳体之间的 缝隙宽度和台阶高度
■ 方案
● MV-DP3020-01H + VM 3D算法平台
■ 效果
● 通过深度图轮廓截取功能和轮廓线测量工具,准确检测出缝隙宽度和台阶高度,重复性精度<0.01mm
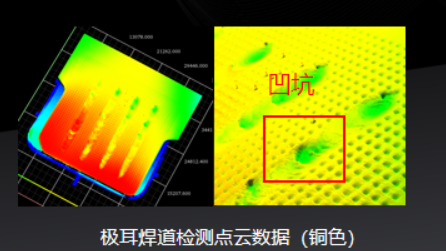
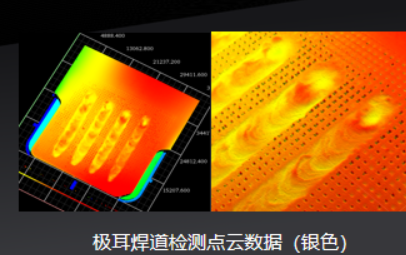
极耳焊接缺陷检测
■ 项目难点
● 爆孔和孔洞区分难度大
● 缺陷类型复杂,位置随机
● 细微瑕疵与极耳颜色相近,难以精确提取缺陷特征
■ 项目需求
● 电芯卷绕、叠片完成后,极耳与顶盖进行焊接,需要 检测焊道凹凸、爆孔、孔洞、发黑
■ 方案
● MV-DP2060-01H + VM 3D算法平台
■ 效果
● 相机扫描极耳焊接位置的3D点云集,通过高度阈值有效拦截焊渣、焊厚等异常