✖
机器人产品线
工业机器人
●ABB工业机器人
●埃斯顿机器人
●海康工业机器人
协作机器人
●UR 优傲机器人
机器人夹爪
机器人底座
视觉产品线
3D相机
●振镜立体相机
●散斑结构光立体相机
●RGB-D智能立体相机
●三维轮廓测量仪
●TOF相机
面阵相机
●面阵相机产品
线阵相机
●线阵相机产品
镜头与配件
●镜头
●线缆
●光源
●日本kowa
AI & 云 产品线
BOX
Deepseek一体机
工控机
服务器
传感器产品线
西克
●槽型传感器
●读码器
●编码器
●距离传感器
●RFID
●速度传感器
●接近传感器
●光电传感器
倍福
解决方案
技术解决方案
●机器人视觉
●视觉测量
●AI缺陷检测
●AI识别
●视觉定位
●3D视觉
●装车自动化
●其他技术解决方案
行业解决方案
●3C电子
●物流
●锂电
●金属加工
●汽车
●其他行业解决方案
高校科研解决方案
●移动式短波红外荧光检测系统
●高速相机在体育运动行业运用
技术服务
软件测评
软件下载
文档下载
关于我们
企业文化
公司简介
发展历程
联系我们
人才招聘
机器人产品线
工业机器人
协作机器人
机器人夹爪
机器人底座
视觉产品线
3D相机
面阵相机
线阵相机
镜头与配件
AI & 云 产品线
BOX
Deepseek一体机
工控机
服务器
传感器产品线
西克
倍福
解决方案
技术解决方案
行业解决方案
高校科研解决方案
技术服务
软件测评
软件下载
文档下载
关于我们
企业文化
公司简介
发展历程
联系我们
人才招聘
一级标题
工业机器人
协作机器人
机器人夹爪
机器人底座
工业机器人
●ABB工业机器人
●埃斯顿机器人
●海康工业机器人
协作机器人
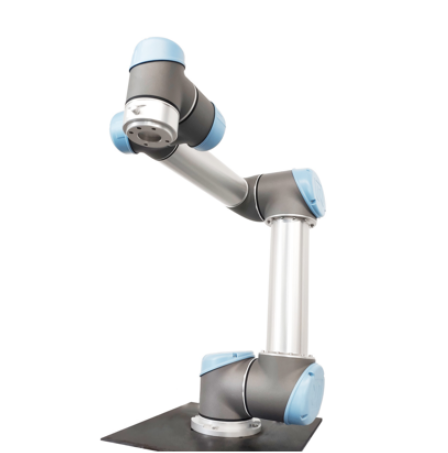
●UR 优傲机器人
机器人夹爪
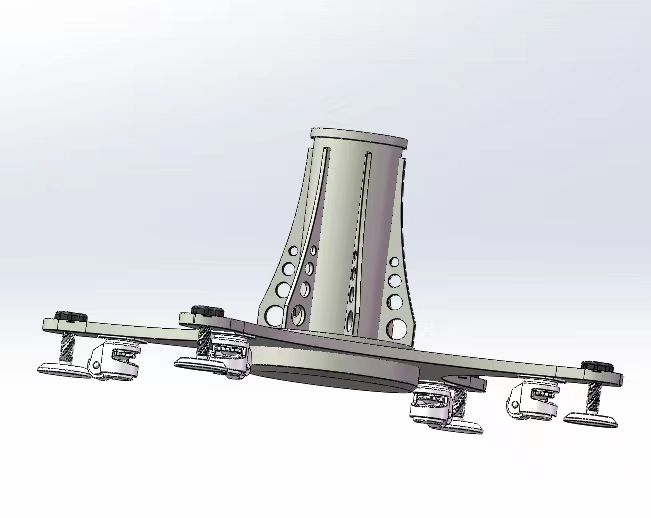
机器人底座
一级标题
3D相机
面阵相机
线阵相机
镜头与配件
3D相机
●振镜立体相机
●散斑结构光立体相机
●RGB-D智能立体相机
●三维轮廓测量仪
●TOF相机
面阵相机
●面阵相机产品
线阵相机
●线阵相机产品
镜头与配件
●镜头
●线缆
●光源
●日本kowa
一级标题
BOX
Deepseek一体机
工控机
服务器
BOX
Deepseek一体机
工控机
服务器
一级标题
西克
倍福
西克
●槽型传感器
●读码器
●编码器
●距离传感器
●RFID
●速度传感器
●接近传感器
●光电传感器
倍福
一级标题
技术解决方案
行业解决方案
高校科研解决方案
技术解决方案
●机器人视觉
●视觉测量
●AI缺陷检测
●AI识别
●视觉定位
●3D视觉
●装车自动化
●其他技术解决方案
行业解决方案
●3C电子
●物流
●锂电
●金属加工
●汽车
●其他行业解决方案
高校科研解决方案
●移动式短波红外荧光检测系统
●高速相机在体育运动行业运用
一级标题
软件测评
软件下载
文档下载
软件测评
软件下载
文档下载
一级标题
企业文化
公司简介
发展历程
联系我们
人才招聘
企业文化
公司简介
发展历程
联系我们
人才招聘
×
首页
>
解决方案
>
技术解决方案
>
●视觉测量
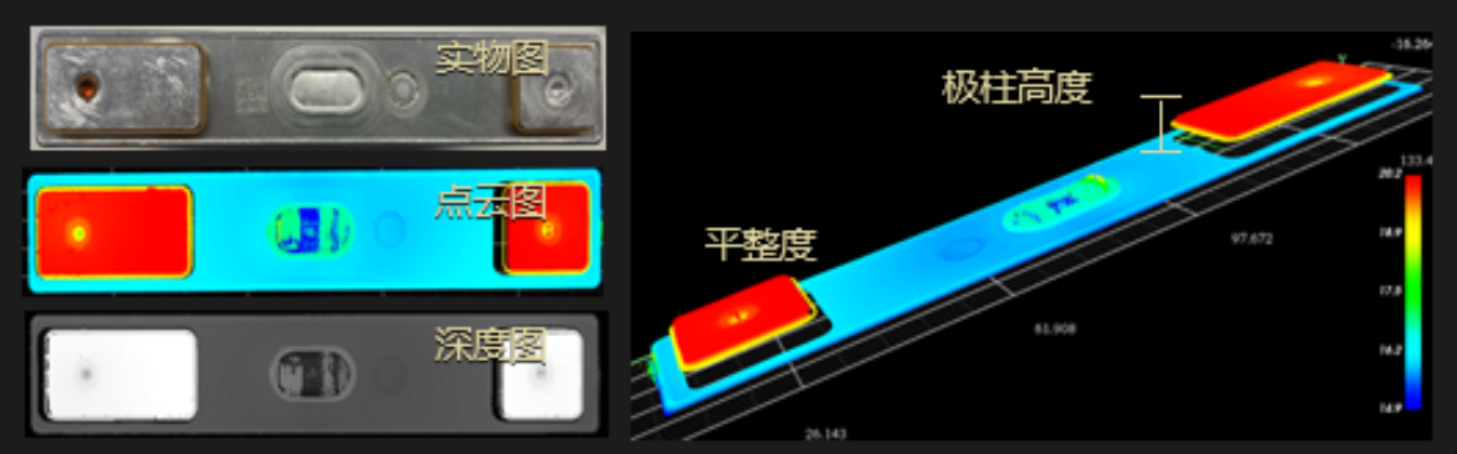
顶盖尺寸测量
■ 项目难点
● 检测节拍、精度要求高
● 锂电池表面反光,影响成像稳定性
■ 项目需求
● 检测锂电池顶盖平整度、长宽尺寸
● 检测正负极柱高度、平整度、共面度
■ 方案
● MV-DP2060-01H + VM 3D算法平台
■ 效果
● 通过相机扫描成像和VM算法处理,精准测量出 锂电池顶盖尺寸,重复性检测精度为1μm
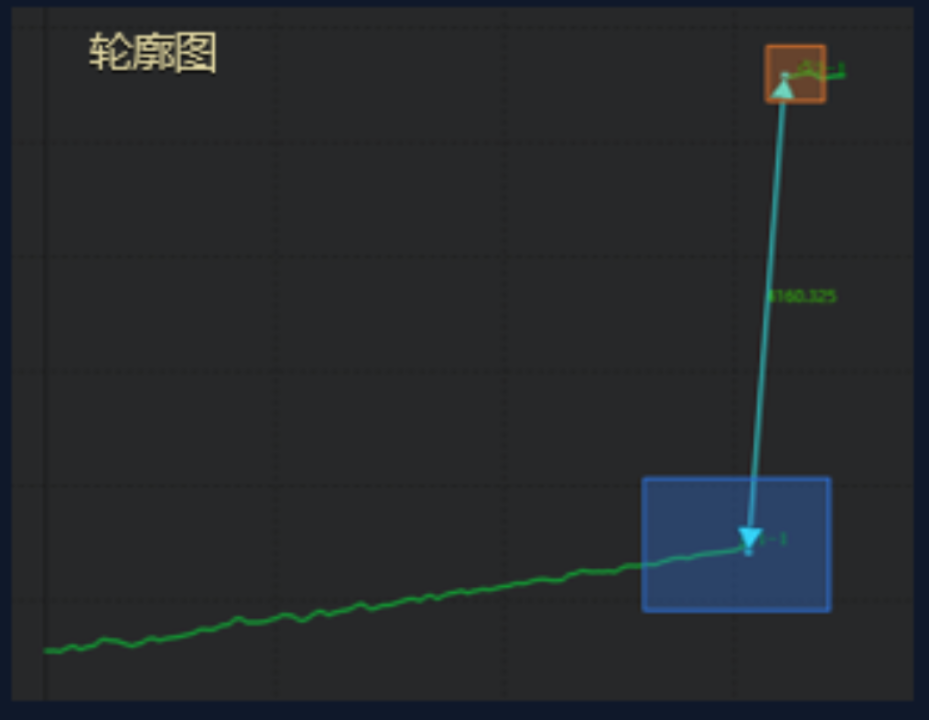
顶盖焊缝检测
■ 项目难点
● 焊接缝隙狭窄,检测精度要求高
● 焊缝边缘有噪点干扰,为算法处理带来干扰
■ 项目需求
● 电芯入壳后顶盖焊接前,需要检测顶盖与壳体之间的 缝隙宽度和台阶高度
■ 方案
● MV-DP3020-01H + VM 3D算法平台
■ 效果
● 通过深度图轮廓截取功能和轮廓线测量工具,准确检测出缝隙宽度和台阶高度,重复性精度<0.01mm
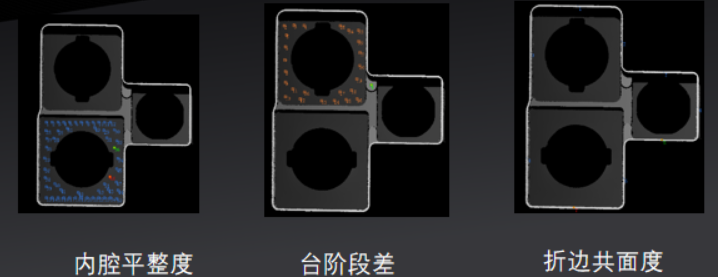
手机模组护罩共面度测量
■ 项目难点
● 壁厚0.2mm,点云数据少
● 效率要求高,1s/Pcs
● 精度要求高,重复/绝对精度要求<0.01mm
■ 项目需求
● 检测手机模组护罩折边共面度及内腔平整度,筛查NG品 动态重复精度<0.01mm
■ 方案
● MV-DP2060-01H + VM 3D算法平台
■ 效果
● 内腔非规则排布64个ROI拟合平面,计算平整度, 重复精度<3.5μm
● 在每条折边上等间隔取采样点拟合平面,计算共 面度,重复精度<3μm
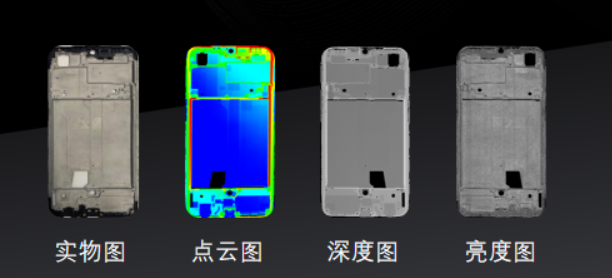
手机中框全尺寸3D检测
■ 项目难点
● 被测物材质多样
● 效率要求高,2s/Pcs
● 检测项目多,重复精度要求高,<0.02mm
■ 项目需求
● 检测电池仓平整度、A级面共面度以及螺钉孔位浮高
■ 方案
● MV-DP2120-01H + VM 3D算法平台
■ 效果
● 电池仓平整度和A级面共面度检测通过仓内阵列ROI, 计算每个ROI相对拟合平面的高度差实现,平整度重复精度<3μm,段差重复精度<10μm
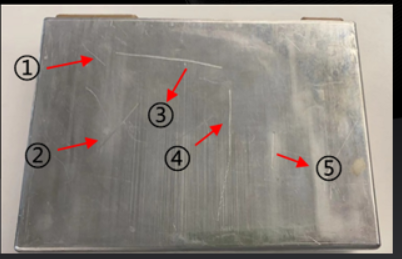
平板电脑盖板平整度检测
■ 项目难点
● 节拍要求高
● 重复性精度小于0.1mm
■ 项目需求
● 平板电脑盖板平整度检测、长宽尺寸检测
■ 方案
● MV-DP2470-01H + VM 3D算法平台
■ 效果
● 平整度重复性精度0.04mm
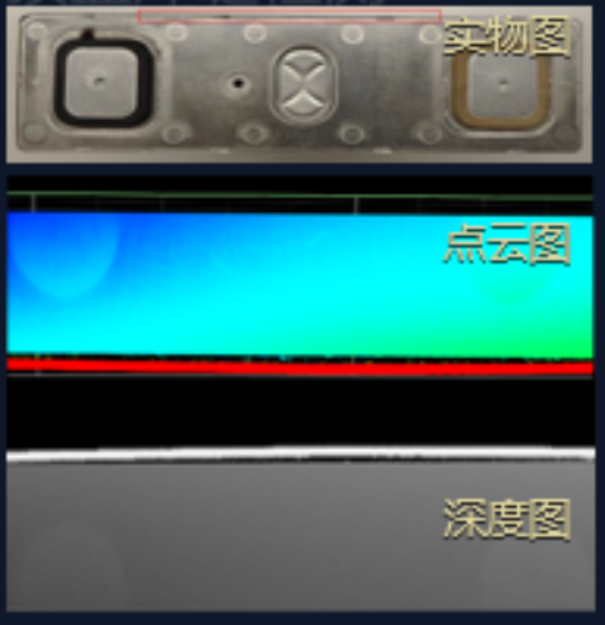
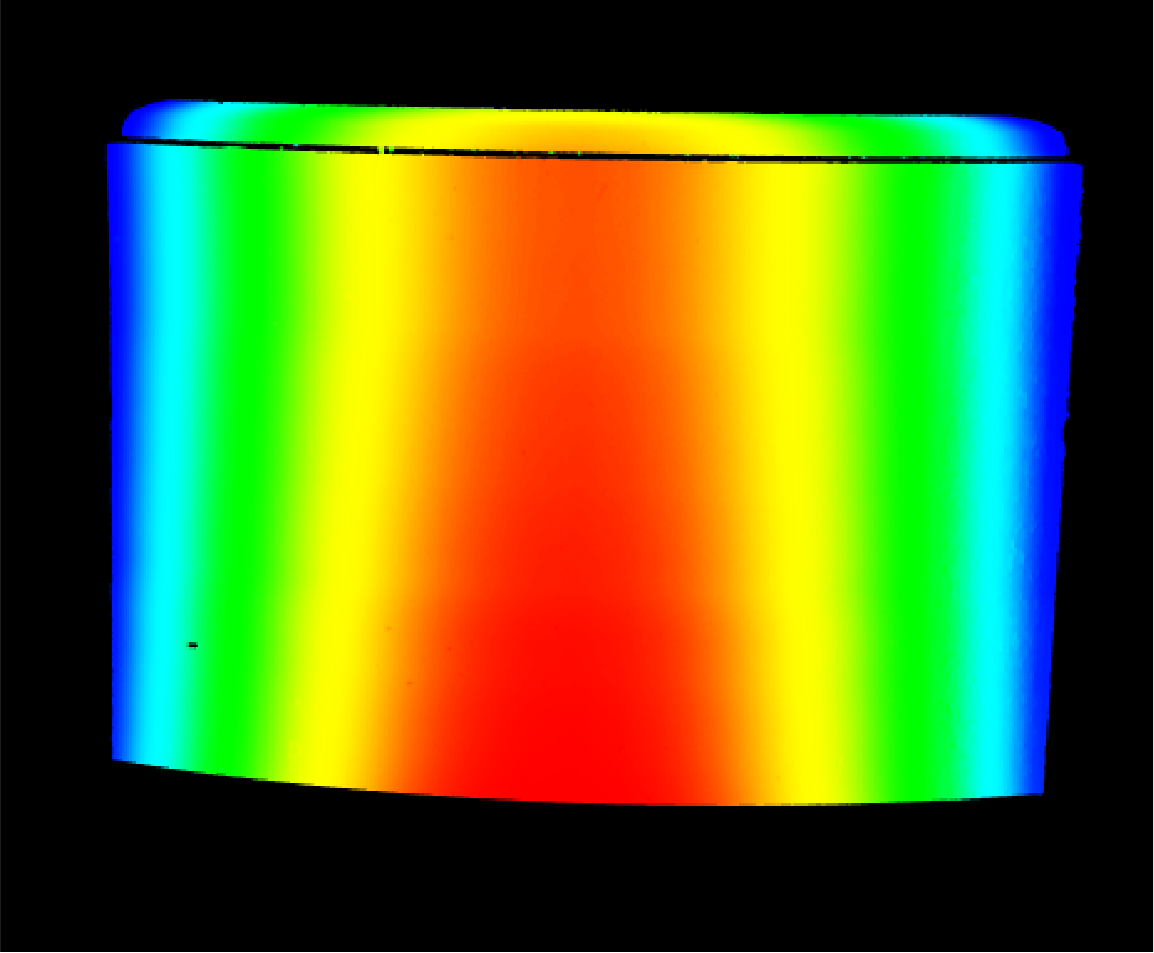
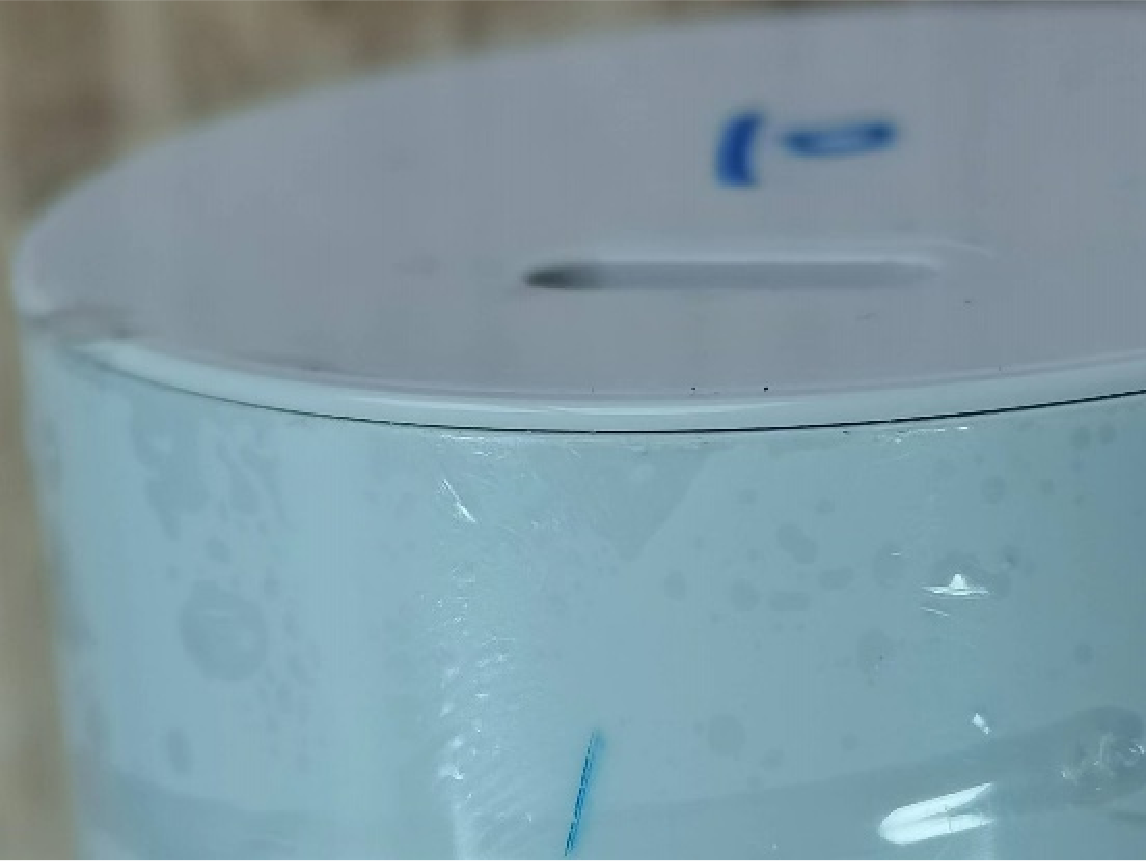
手机充电器缝隙检测
■ 项目难点
● 缝隙狭窄,精度要求高
● 圆形充电器需旋转扫描成像,工装设计要求高
■ 项目需求
● 手机充电器缝隙宽度检测、台阶高度检测
■ 方案
● MV-DP3020-01H + VM 3D算法平台
■ 效果
● 缝隙宽度重复性精度0.69μm
● 台阶高度重复性精度0.75μm
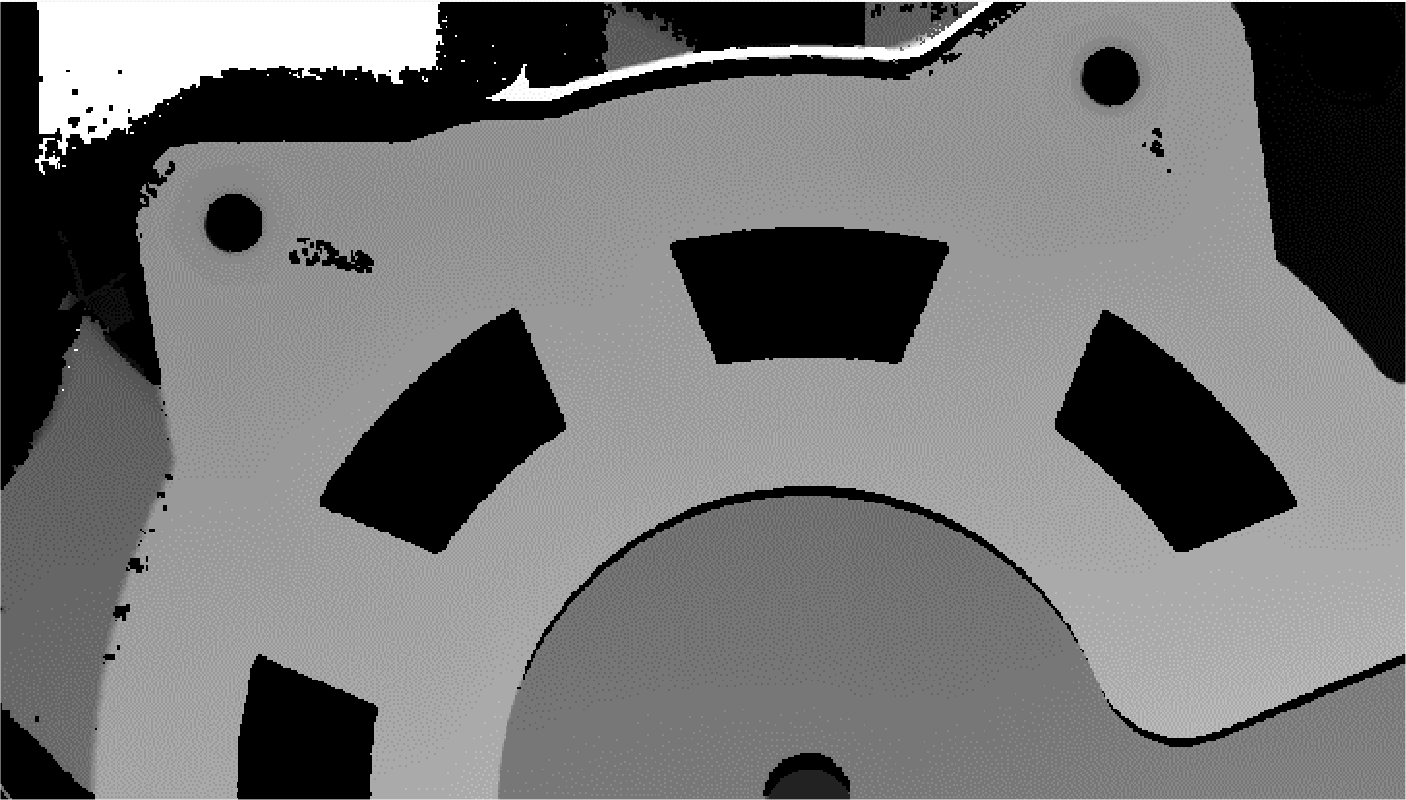
汽车基板平整度检测
■ 项目难点
● 圆形胶圈需要旋转扫描,对工装精度要求高
● 基板表明存在微小凹坑与凸起,检测精度要求高
■ 项目需求
● 为防止汽车冷却液外渗,需检测汽车基板平整度,确保基板与冷却液盛放装置紧密贴合
■ 方案
● MV-DP2060-01H + VM 3D算法平台
●单台相机双次扫描进行数据源拼接成像,通过VM测量平整度