| 型号 | UR3机器人 | ||
| 有效负载 | 3公斤 | ||
| 有效工作半径 | 500毫米 | ||
| 关节范围 | +/-360 第六轴无限旋转 | ||
| 速度 | 所有腕关节:360度/秒 肩、肘、基座关节:180度/秒 工具端:1米/秒 | ||
| 自重 | 11公斤 | ||
| 可重复精度 | +/-0.1毫米(按照 ISO 9283标准) | ||
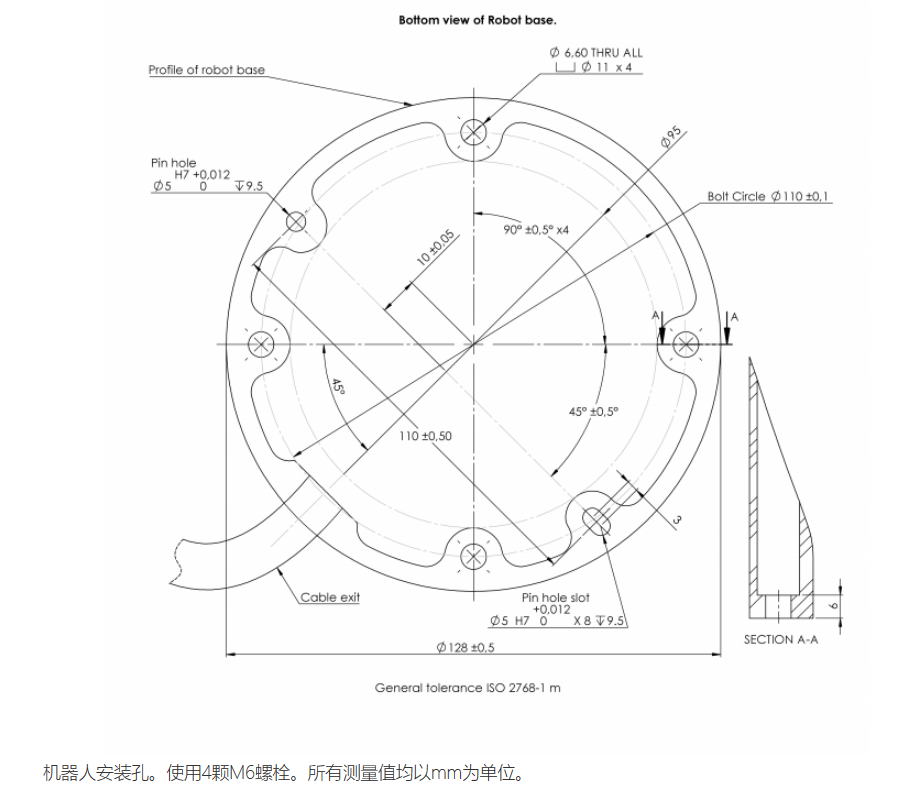
| 底座安装面积 | 直径118毫米 | ||
| 自由度 | 6个旋转关节 | ||
| 控制箱尺寸 | 475毫米*423毫米*268毫米 | ||
| I/O端口 | 控制箱 工具端 数字量输入 16 2 数字量输出 16 2 模拟量输入 2 2 模拟量输出 2 - | ||
| I/O电源 | 控制箱中为24V/2A,工具端为12V/24V 600mA | ||
| 编程 | Polyscope图形化用户界面,12”触摸屏带固定支架 | ||
| IP等级 | IP64 | IP54 | |
| 温度 | 机器人可在0-50℃的温度范围内工作 | ||

| 型号 | UR3机器人 | ||
| 有效负载 | 5公斤 | ||
| 有效工作半径 | 850毫米 | ||
| 关节范围 | +/-360 第六轴无限旋转 | ||
| 速度 | 关节:最大180度/秒 工具端:1米/秒 | ||
| 自重 | 18.4公斤 | ||
| 可重复精度 | +/-0.1毫米(按照 ISO 9283标准) | ||
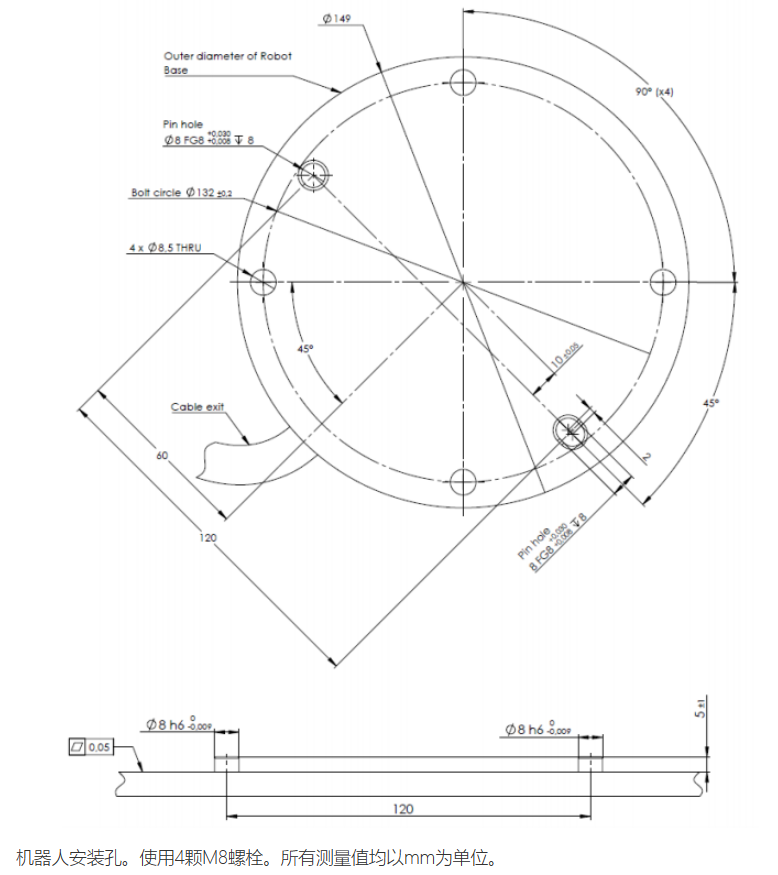
| 底座安装面积 | 直径149毫米 | ||
| 自由度 | 6个旋转关节 | ||
| 控制箱尺寸 | 475毫米*423毫米*268毫米 | ||
| I/O端口 | 控制箱 工具端 数字量输入 16 2 数字量输出 16 2 模拟量输入 2 2 模拟量输出 2 - | ||
| I/O电源 | 控制箱中为24V/2A,工具端为12V/24V 600mA | ||
| 编程 | Polyscope图形化用户界面,12”触摸屏带固定支架 | ||
| IP等级 | IP64 | IP54 | |
| 温度 | 机器人可在0-50℃的温度范围内工作 | ||

| 型号 | UR16e | |||
| 有效载荷 | 16kg(35.3lbs) | |||
| 工作半径 | 900mm(35.4in) | |||
| 自由度 | 6个旋转关节 | |||
| 编程 | PolyS12英寸触摸屏图形用户界面 | |||
| 功耗(平均),最大平均值功耗 | 585W | |||
| 通常是适度操作设置得近似值 | 350W | |||
| 认证 | ENISO 13849-1,PLD3类,以及ENISO 10218-1 | |||
| 符合ISO 9283的位姿可重复性 | ±0.05mm | |||
| 轴移动 -基座 -肩部 -肘部 -腕部1 -腕部2 -腕部3 | 工作范围 最大速度 ±360° ±120°/S ±360° ±120°/S ±360° ±180°/S ±360° ±180°/S ±360° ±180°/S ±360° ±180°/S | |||
| 典型TCP速度 | 1m/s(39.4in/s) | |||
| IP等级 | IP54 | |||
| I/O端口 数字输入 数字输出 模拟输入 | 2 2 2 | |||
| 湿度 | 90%相对湿度(非冷凝) | |||
| 重量(含缆线) | 33.1kg(73lbs) | |||